Avian
For full information on Avian: https://sites.google.com/berkeley.edu/206a-avian/
AVIAN is a fully onboard, real-time vision-based navigation system deployed on a custom-built quadcopter. The platform performs monocular pose estimation, state filtering, 3D path planning, and closed-loop control to autonomously navigate indoor waypoint environments without external motion capture.
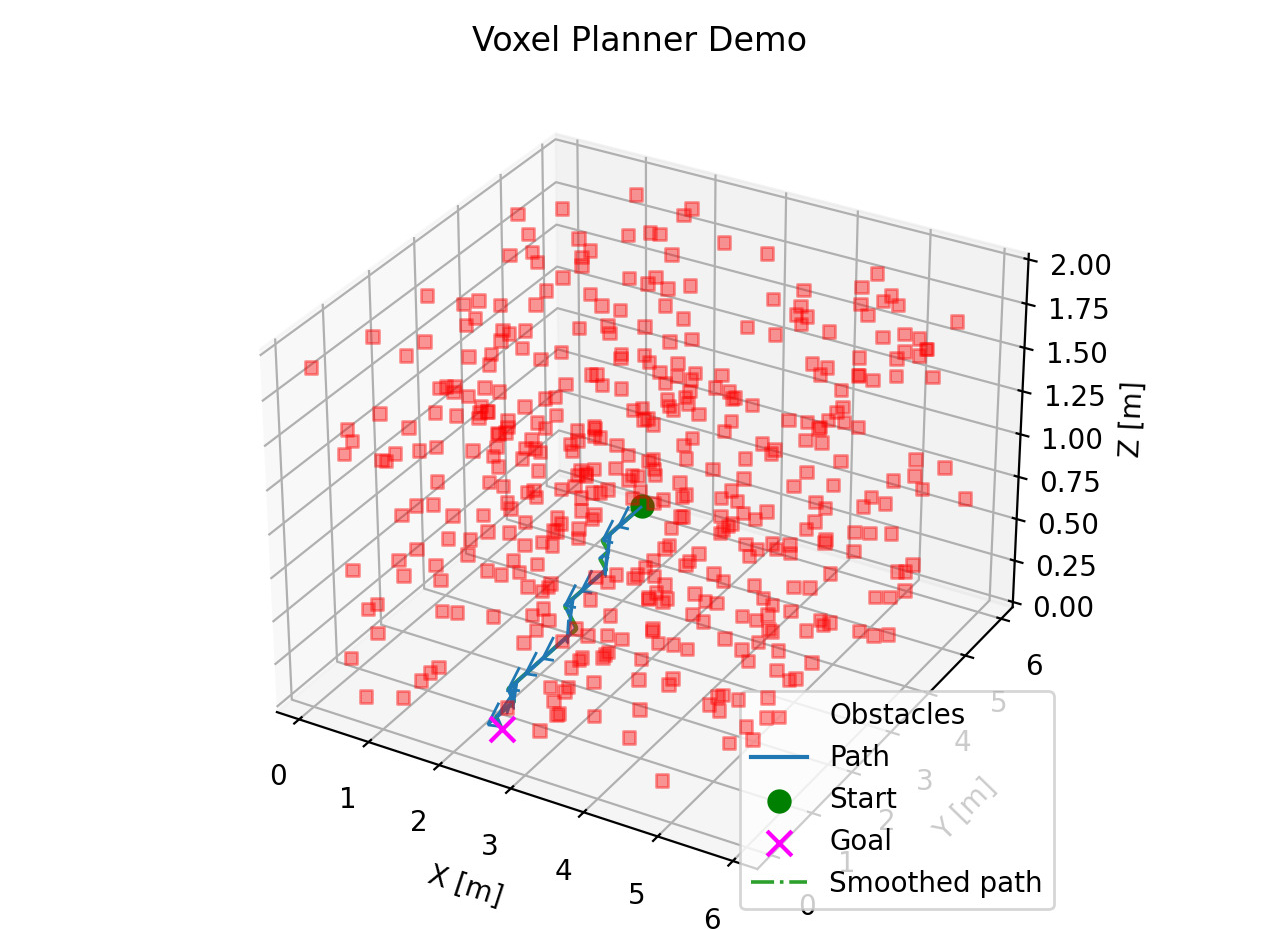
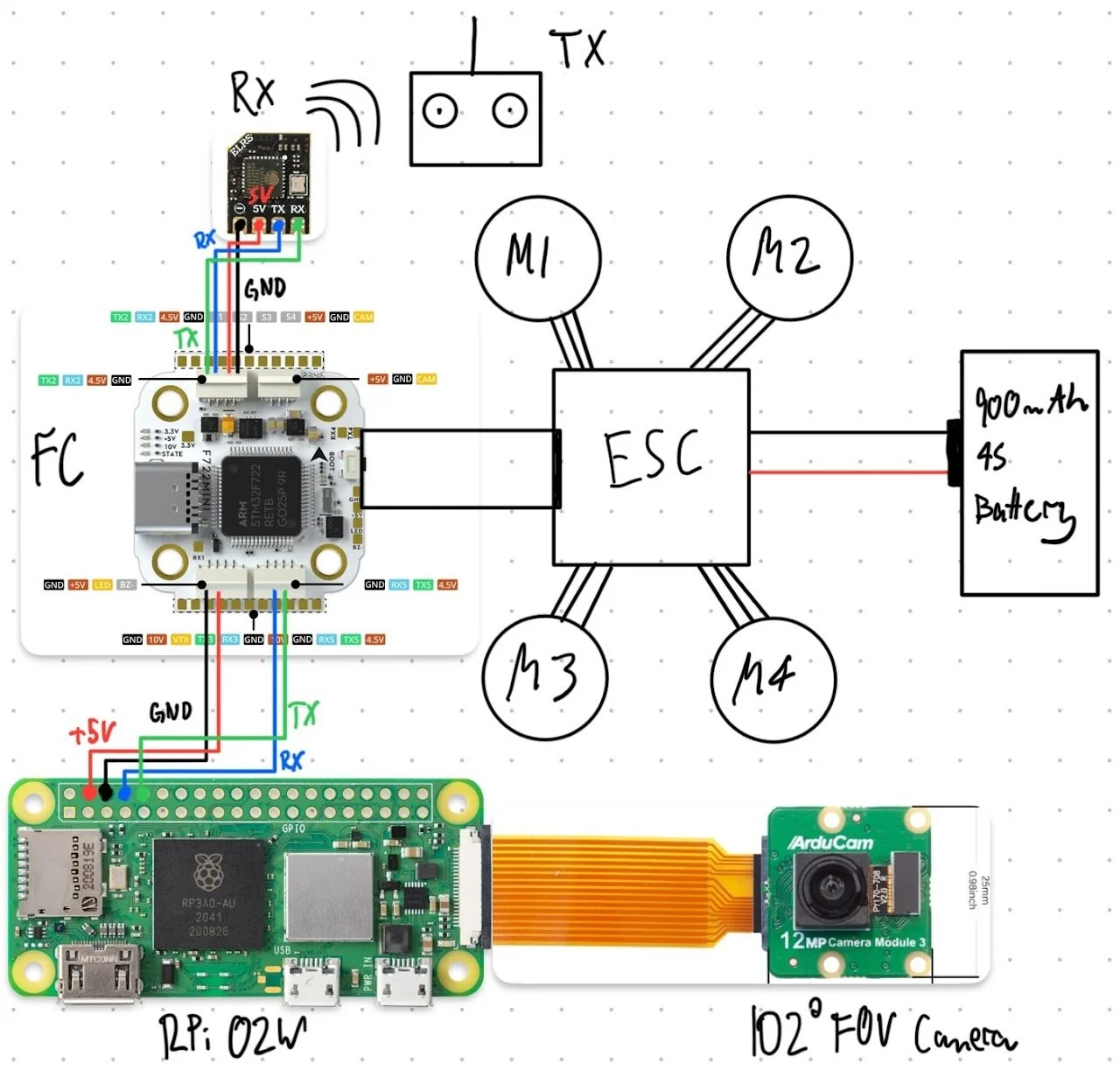
The system integrates onboard computer vision (OpenCV solvePnP), a Kalman-filter-based state estimator, PD control, and a custom MSP interface to override a Betaflight flight controller in real time. A lightweight 3D occupancy grid with obstacle inflation and A* planning generates collision-free trajectories, which are smoothed and dynamically corrected during flight.
My impact
Designed and implemented the 3D path planning and trajectory generation stack, including occupancy grid inflation, weighted A* search, spline smoothing, and real-time correction
Contributed to drone hardware integration and system deployment, balancing compute, weight, and flight-time constraints
Helped architect a deterministic, multi-threaded onboard software system running on a Raspberry Pi companion computer
Validated autonomous waypoint navigation under tight latency and processing constraints